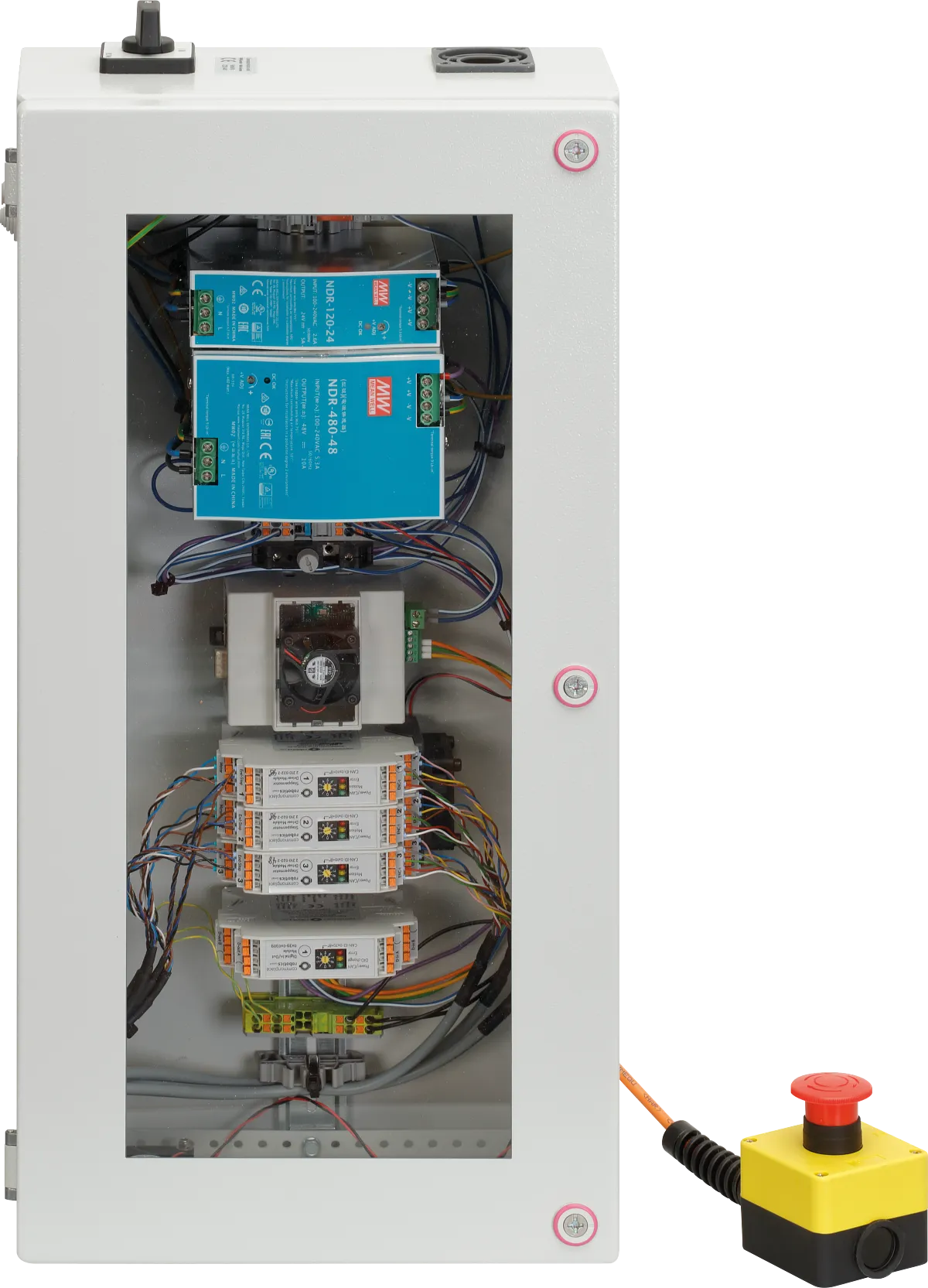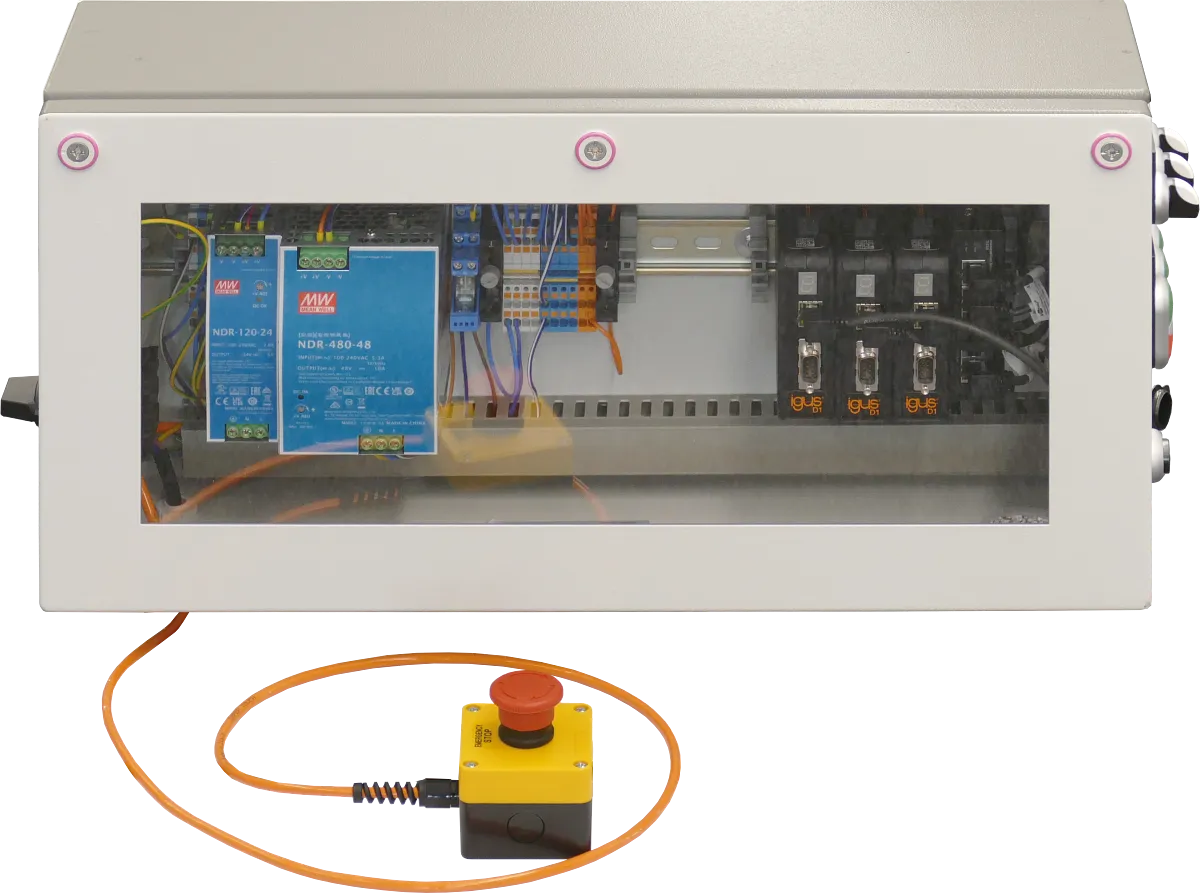































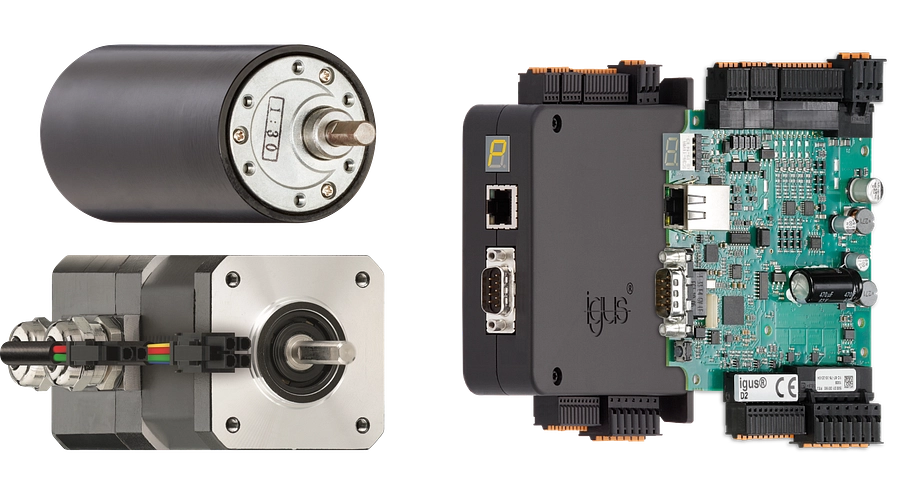














































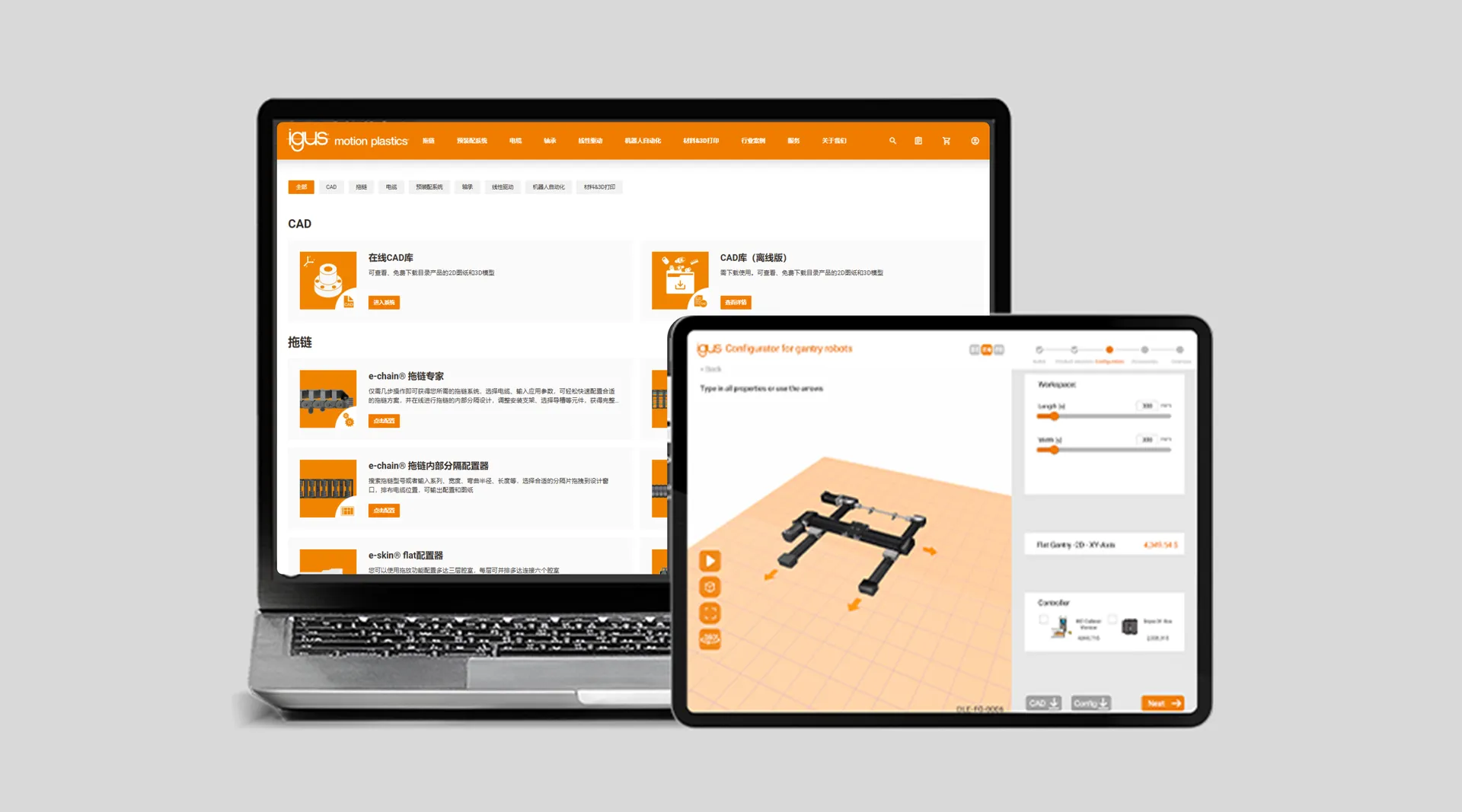















机器人控制方式可以是固定执行动作方式,即主控系统预先编写好固定参数的程序给运动控制器;也可以是根据传感器信号动态调整的,即编写不固定参数的程序给运动控制器。机器人控制系统接收来自传感器的检测信号,这些信号反映了机械臂关节的实际运动状态和工作环境的变化,信号被主控系统处理。主控系统通过内置的运动控制算法,计算出需要驱动电机的电压和电流。伺服或步进驱动器作为驱动机构,负责将主控系统的控制信号转换为电机的物理运动。易格斯提供即插即用型机器人控制系统和免费软件,可以直观地显示、编程和控制机器人的运动序列,操作直观易懂。
improve what moves