


























































































水果自主采摘机器人
水果采摘环节的人力成本占到果农经营成本的一半以上,技术进步,人工智能、机器视觉等技术发展提升了水果采摘机器人的性能和适用性。
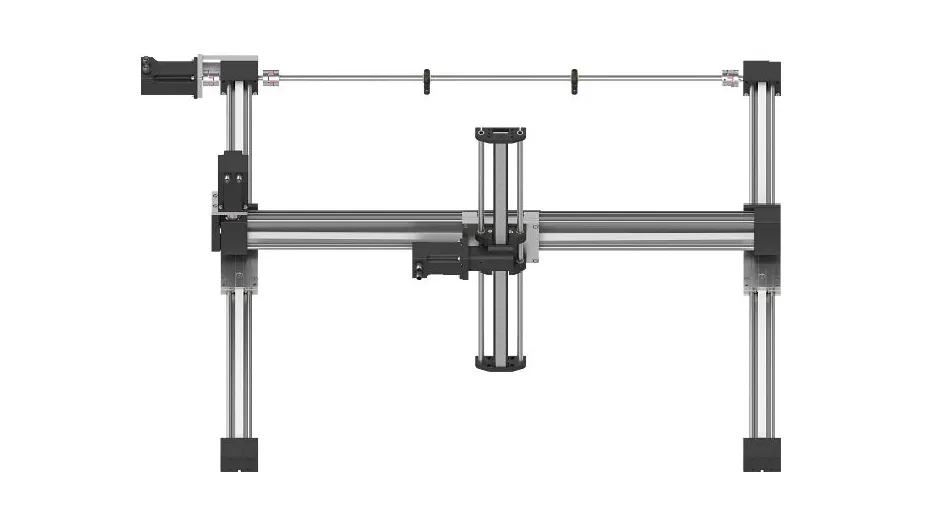
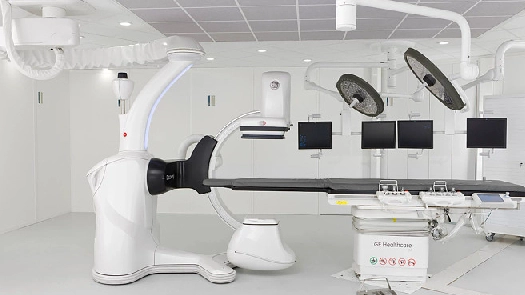
2024年,意大利米兰理工学员开展了一项研究,旨在受控、模拟的棚架式苹果园环境中,探究自主水果采摘技术的应用。该果园的苹果树经过修剪,呈平面状依附垂直棚架生长,模拟了商业果园常见的结构化布局。这种标准化环境有助于对机器人水果采摘系统进行精确测试与优化。移动机器人平台配备易格斯ReBeL 六自由度机械臂和先进传感设备,可在果园行间穿梭,精准识别并采摘成熟苹果。该系统利用立体深度相机进行感知,通过柔软的气动夹爪执行器抓取树上果实。

所用产品
Softgripper 柔性夹爪

在对精度与产品完整性要求较高的水果采摘场景中,柔性夹爪以仿生学设计突破传统抓取技术局限。其采用记忆合金与柔性硅胶复合材质,通过气压自适应调节实现包裹式抓取,可完成无损采摘作业。
ReBeL 协作机器人
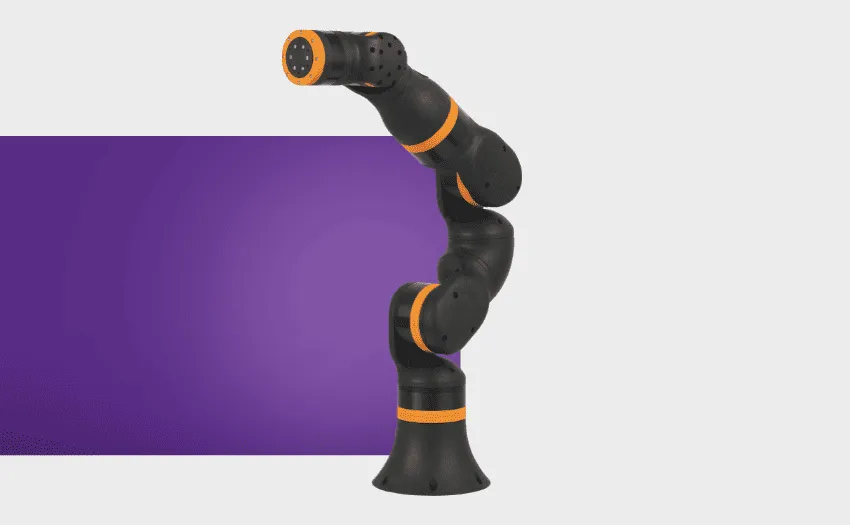
凭借六轴灵活设计,能实现多角度精准操作,轻松应对不同高度、位置的果实采摘。机身轻巧紧凑,在果园棚架间穿梭自如。多种末端执行器可选,无论是抓取娇嫩草莓的真空吸盘,还是采摘苹果柔性夹爪,ReBeL均可快速适配。
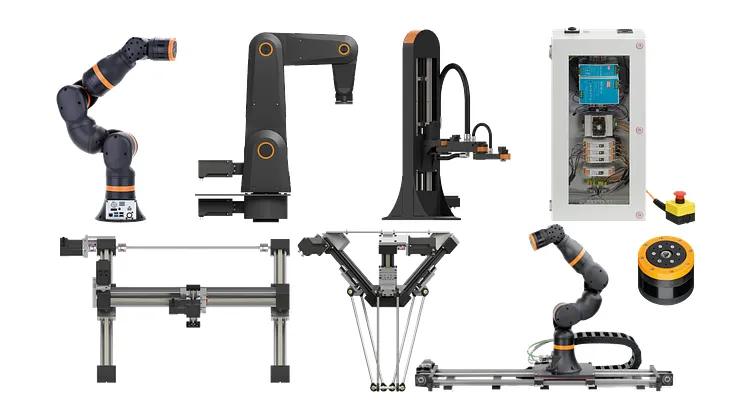
您还可以选择这些机器人产品

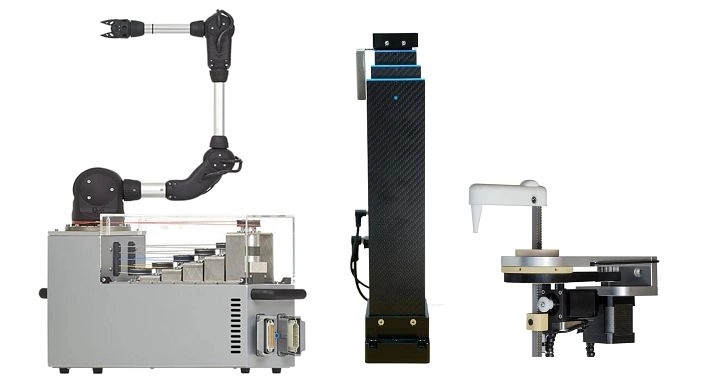
Z-Arm 1832 水平关节机器人
Scara水平关节机器人结合了精度高、功能多、安全可靠的特点
- Z轴180mm,臂展320mm
- 易于编程
- 碰撞检测
¥18,100起
协作机器人系列
五款((FR3、FR5、FR10、FR16、FR20))均可实现灵活的自动化需求
- 双编码器,精度高
- 质量认证
- 应用集成灵活
¥22,800起

