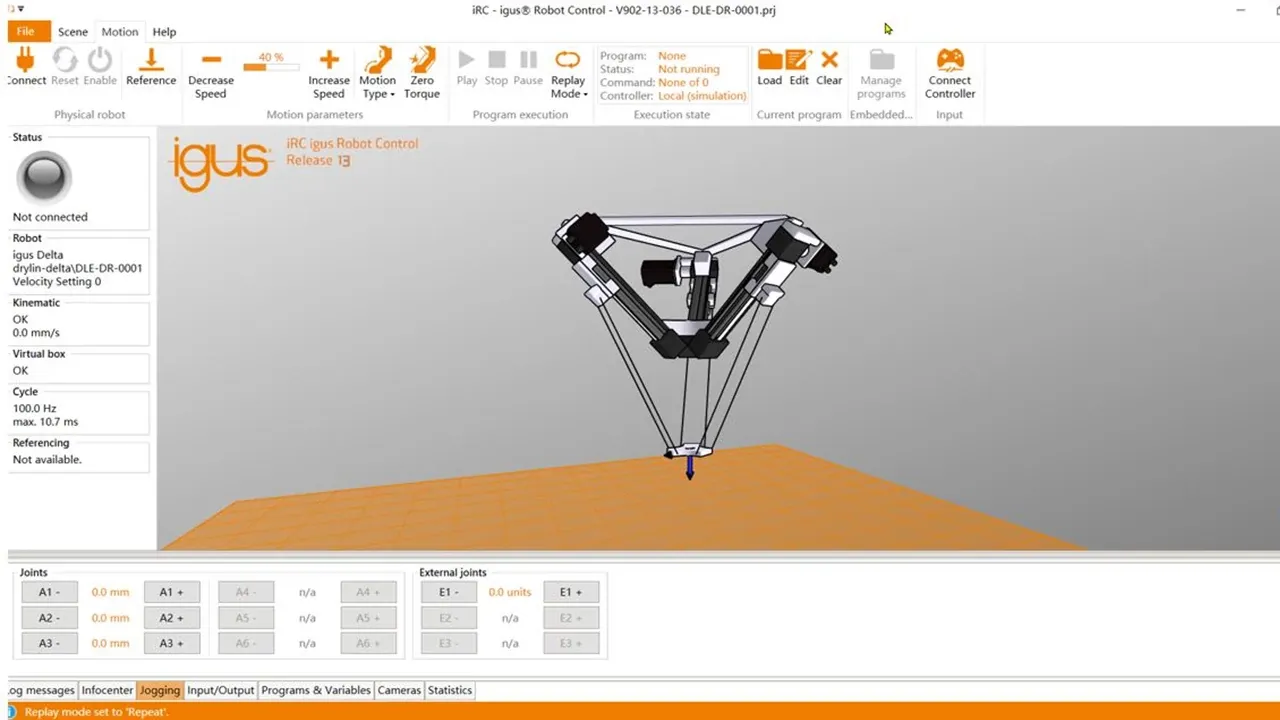
iRC 项目配置与常用指令
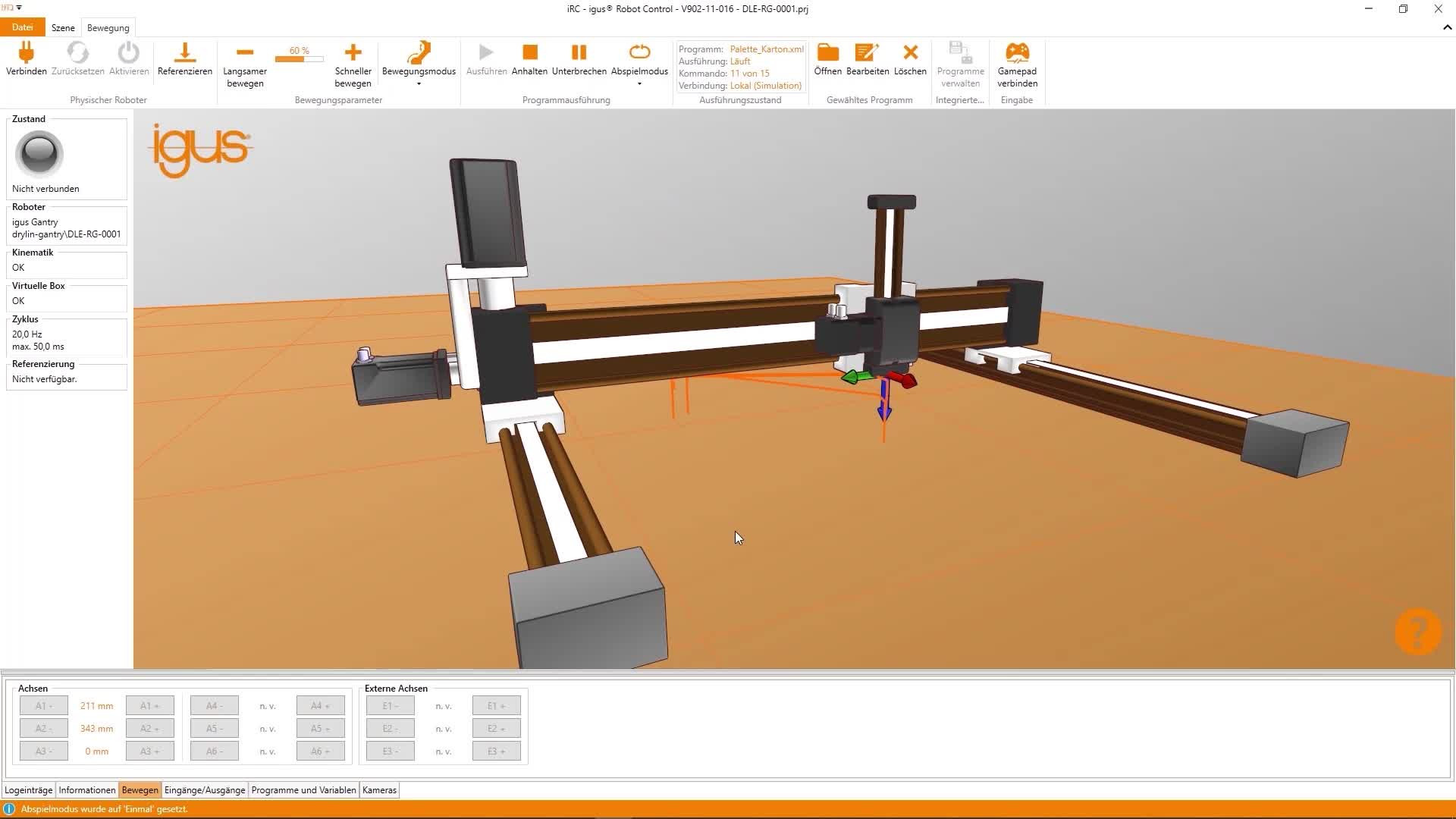
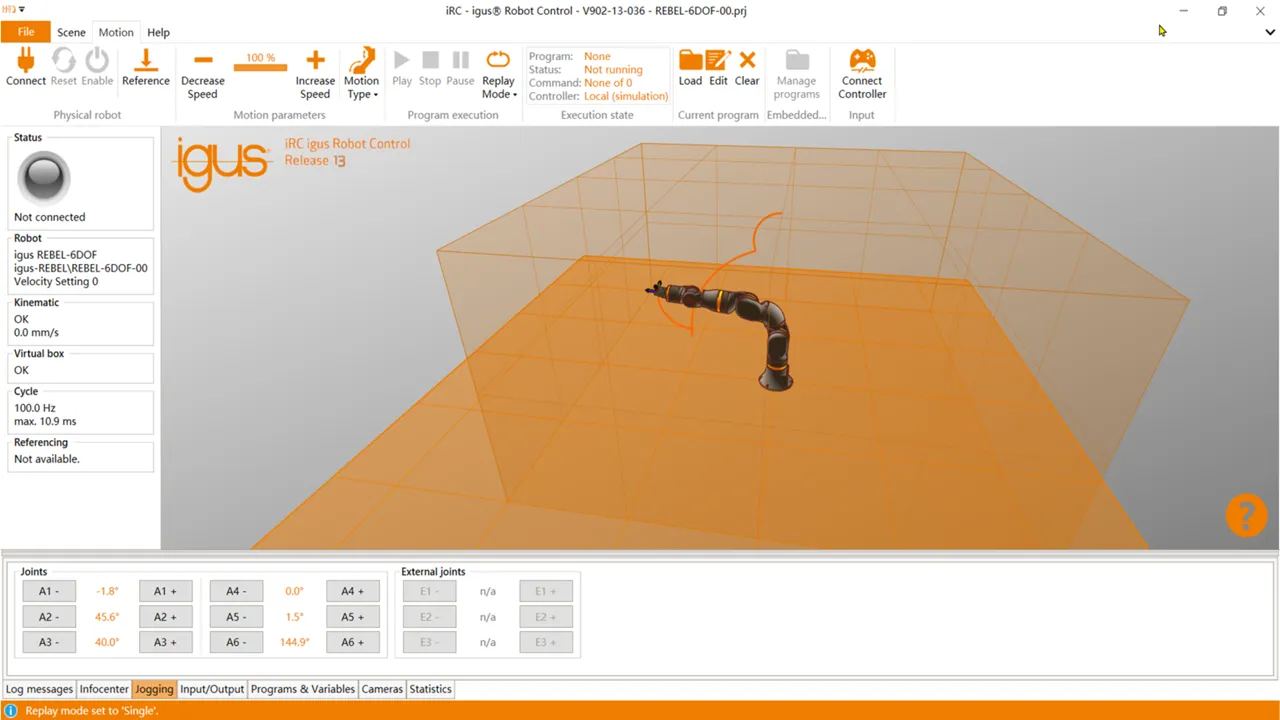
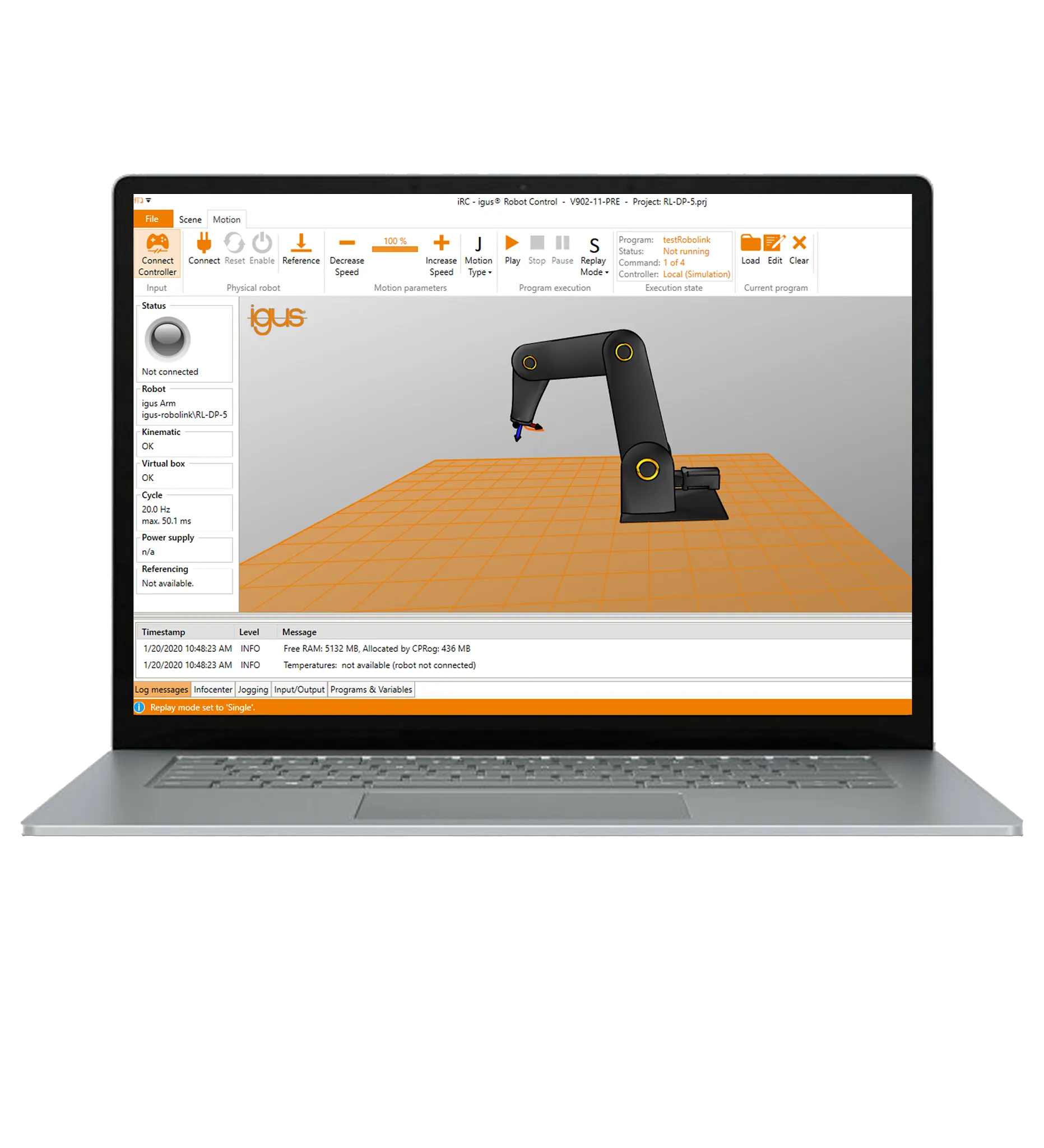
igus®机器人控制实现了简单直观的机器人编程和控制,并轻松实现自动化。由于模块化设计,iRC可以控制不同的机器人运动,例如Delta蜘蛛手机器人、Gantry线性机器人和Robolink或Rebel多轴关节机器人。软件3D交互界面实时直观显示机器人姿态,用户可以编程预演,也可以连接真实机器人后进行远程观察程序运行。
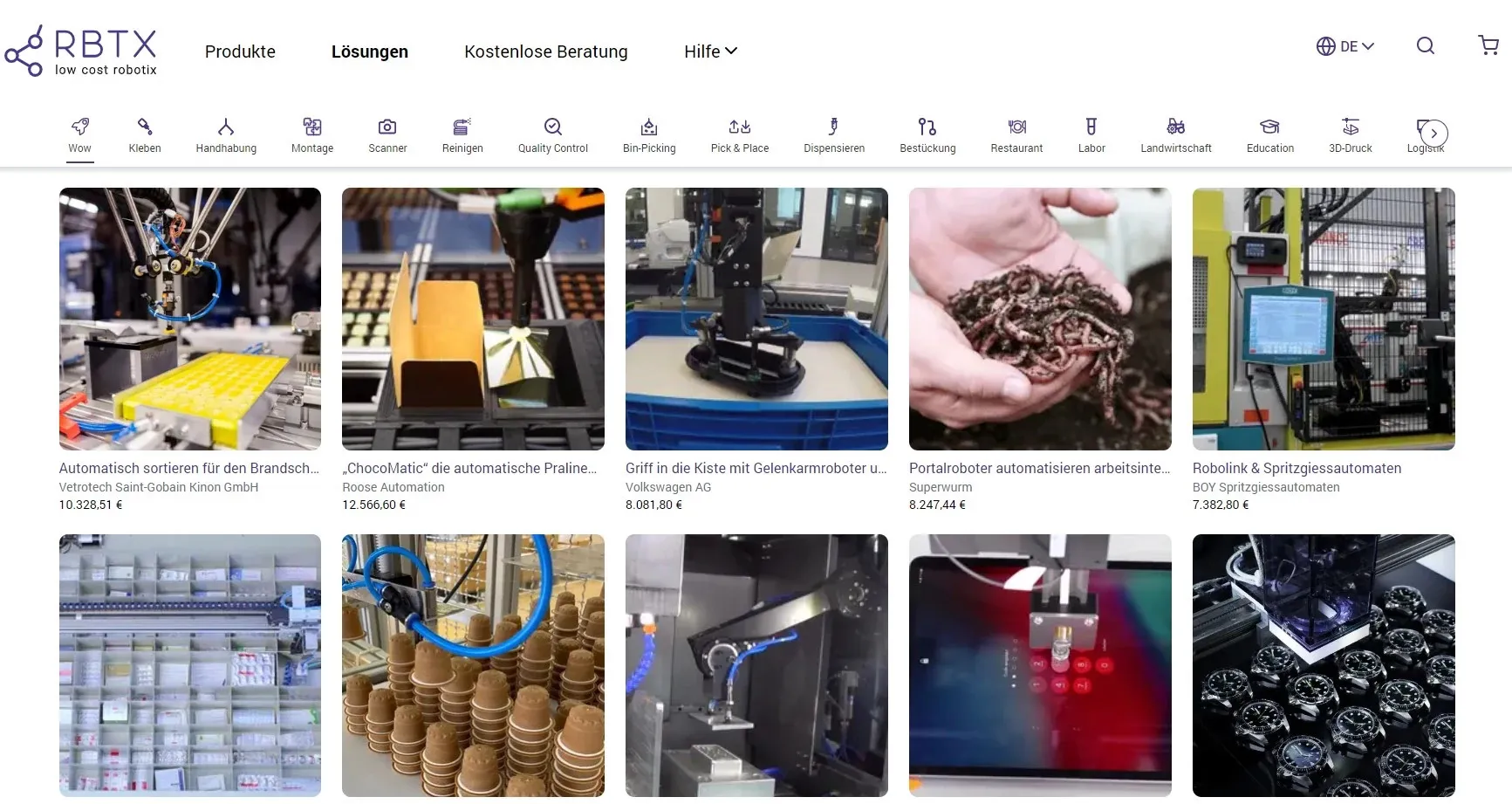
iRC控制案例
iRC编程快速入门
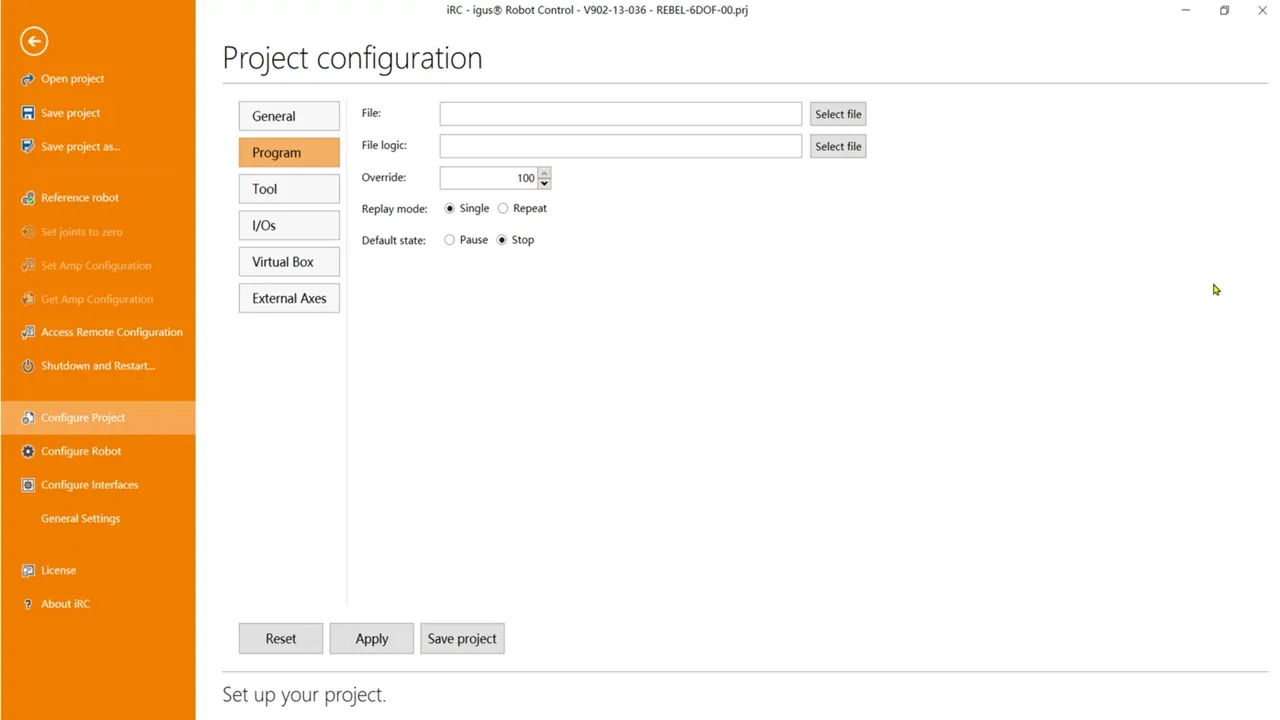
程序( Programs)设置
在这里您可以设置机器人、逻辑程序、运动速度(以最大速度的百分比)、运行模式、错误应对。
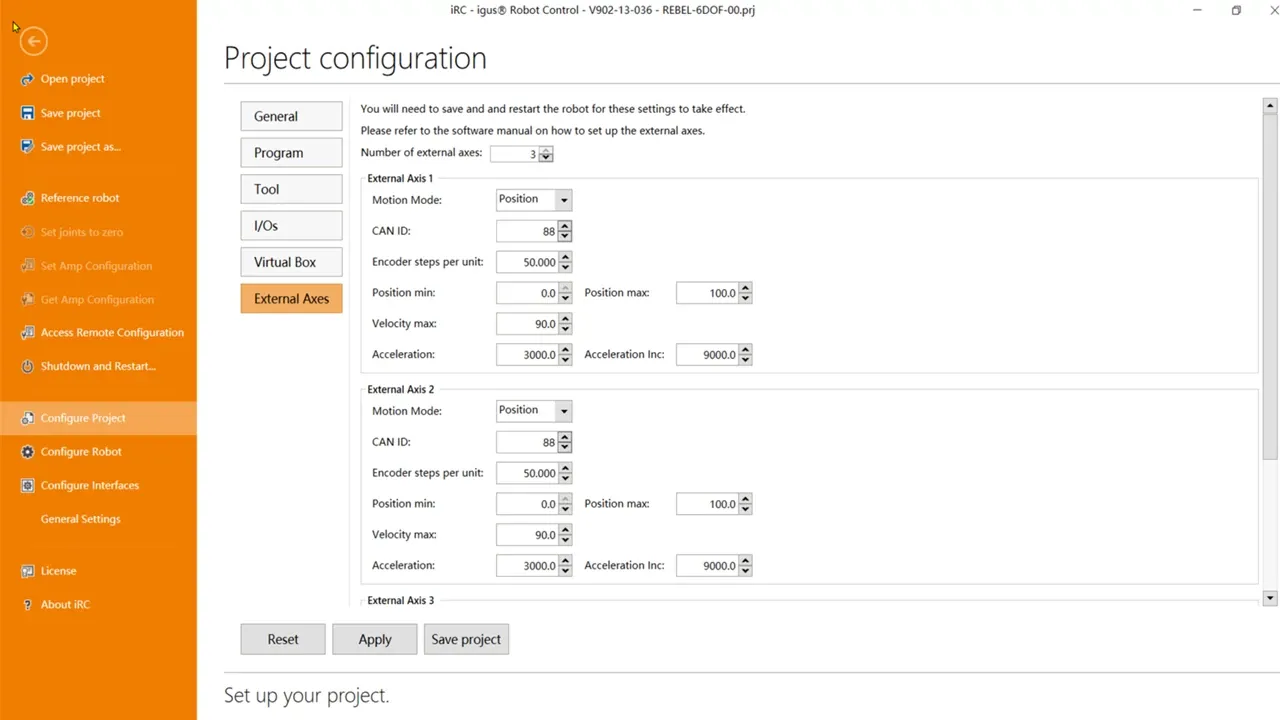
特殊运动的定义
机器人控制系统可以通过在软件系统输入路径形式进行运动控制,也可以通过拖拽示教方式生成运动路径。
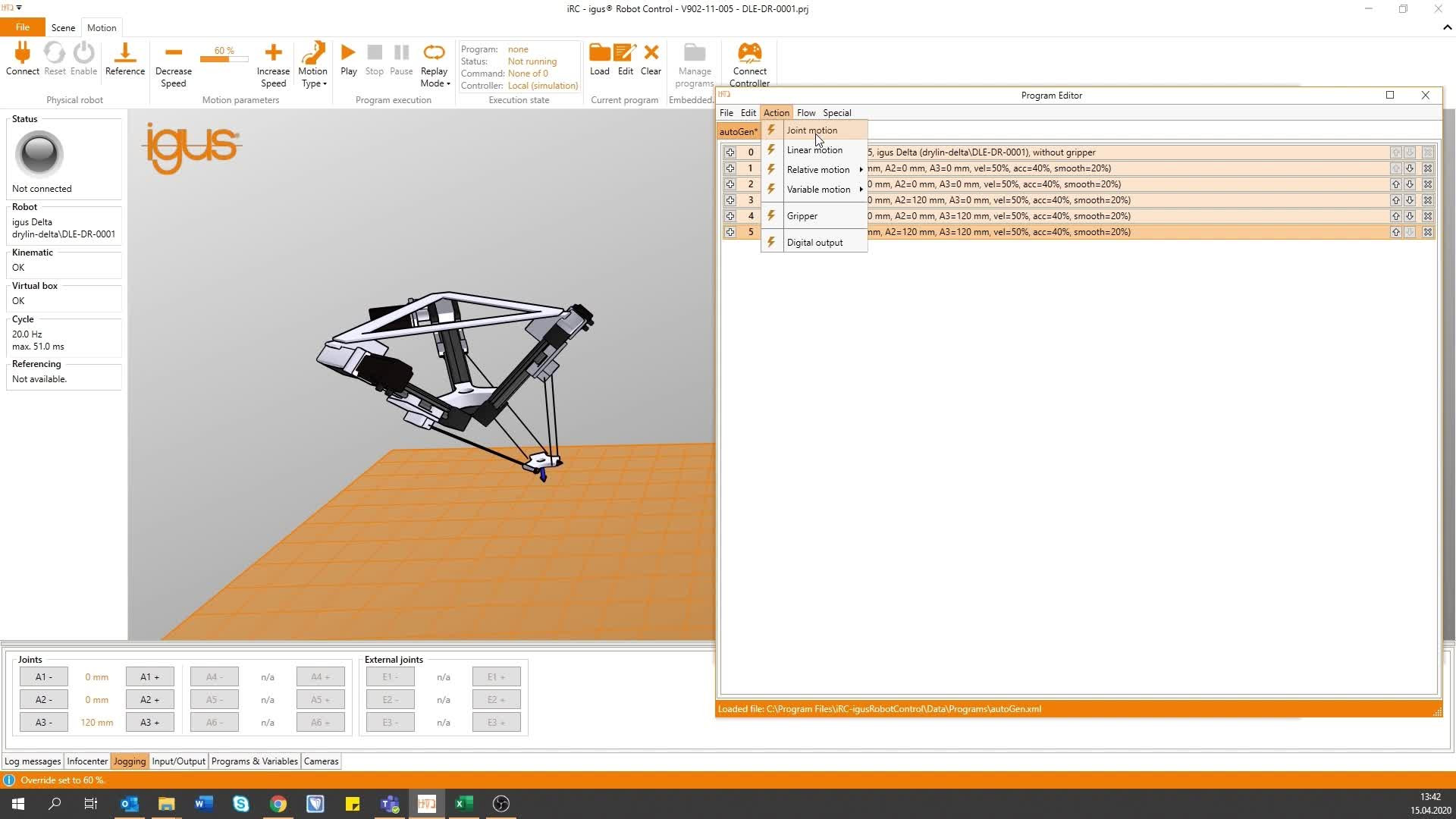
常用指令
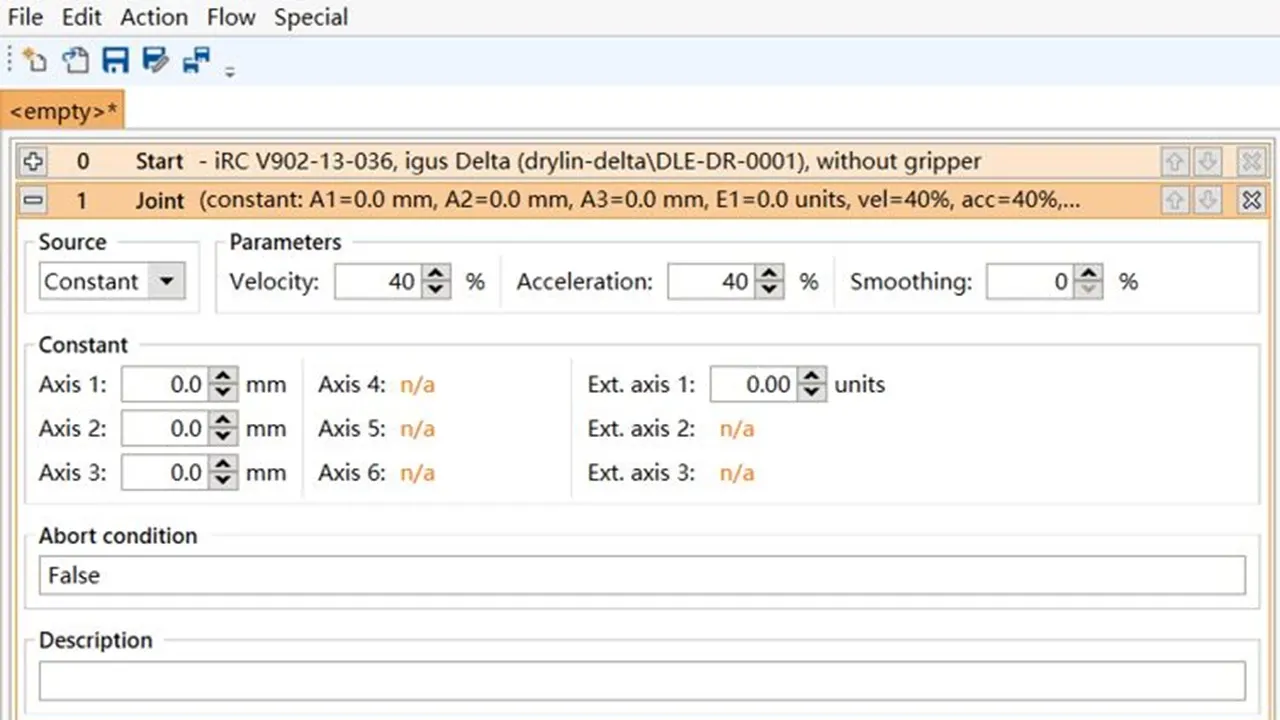
Axis 轴运动
Joint命令将机器人移动到轴坐标中指定的绝对目标位置(例如轴角度或线性轴的位置)。由此产生的TCP运动通常是一条曲线,而不是一条直线。
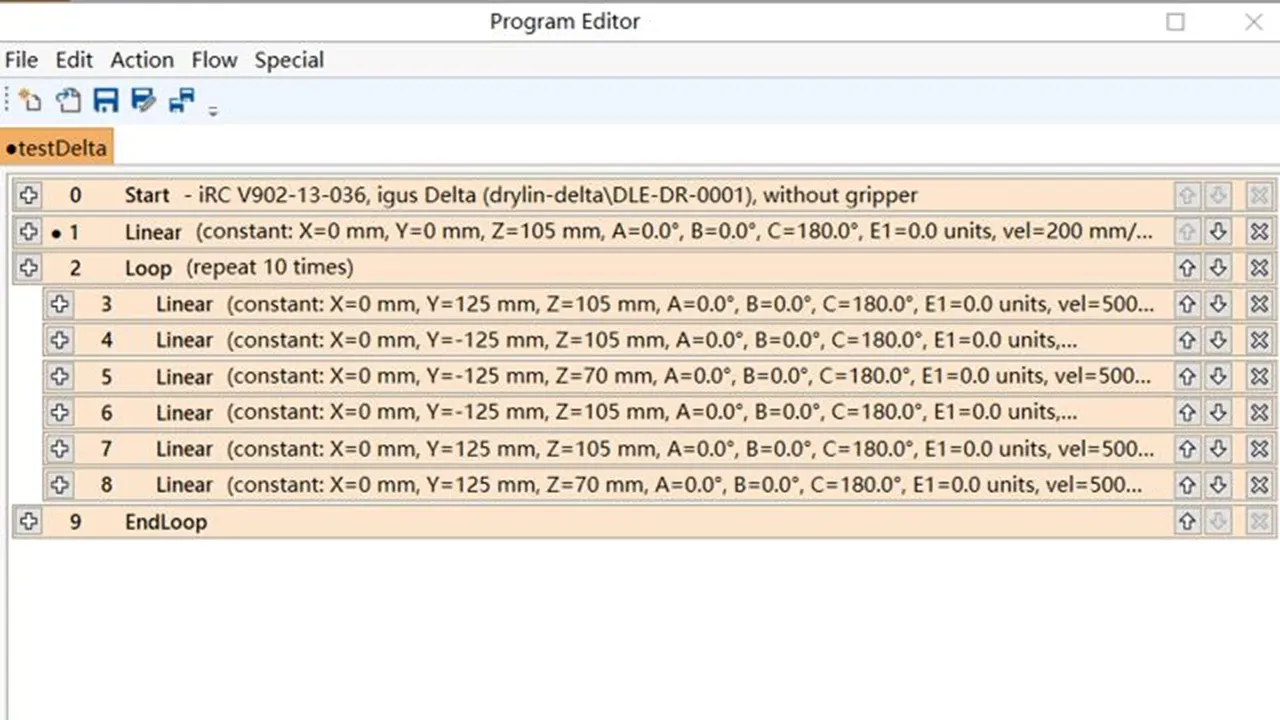
Linear线性运动
线性命令将机器人移动到笛卡尔坐标中指定的(绝对)目标位置,由此产生的TCP运动遵循一条直线。
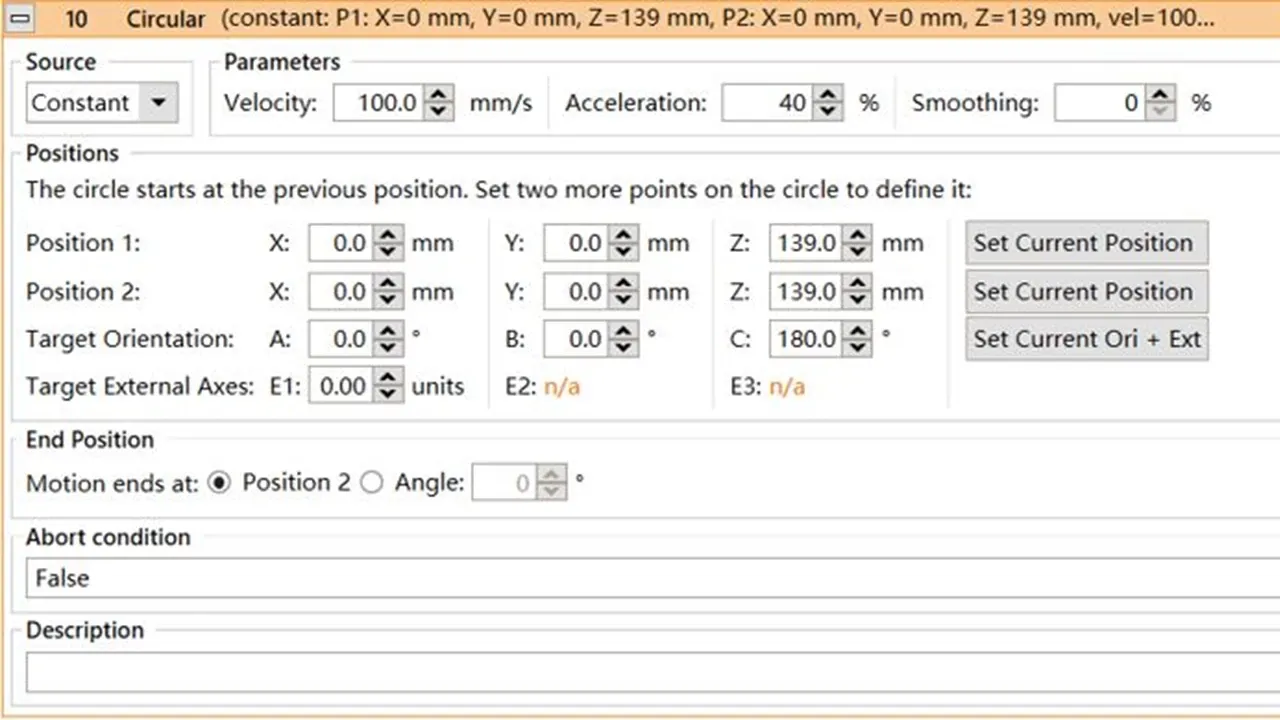
Circular圆周运动
圆周运动指令允许沿整个或部分圆移动。它与线性运动兼容,因此可以平滑线性运动之间的过渡。

Conditions条件语句
条件可用于 if-then-else 命令、循环以及作为移动命令中的终止条件。条件可以是数字输入、全局信号、布尔运算和比较的组合。
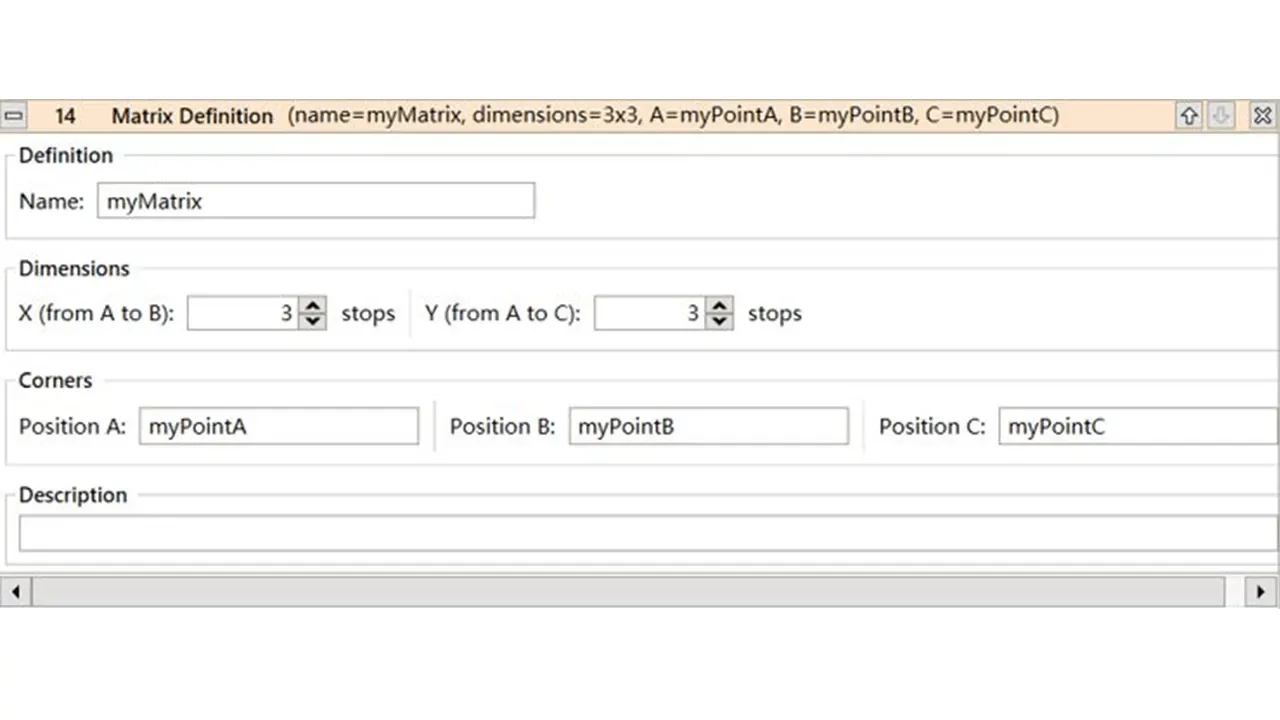
Matrix矩阵运算
矩阵运算适用于网格对齐的位置计算,例如作为码垛任务的抓取或注液机器人的浇注位置计算。
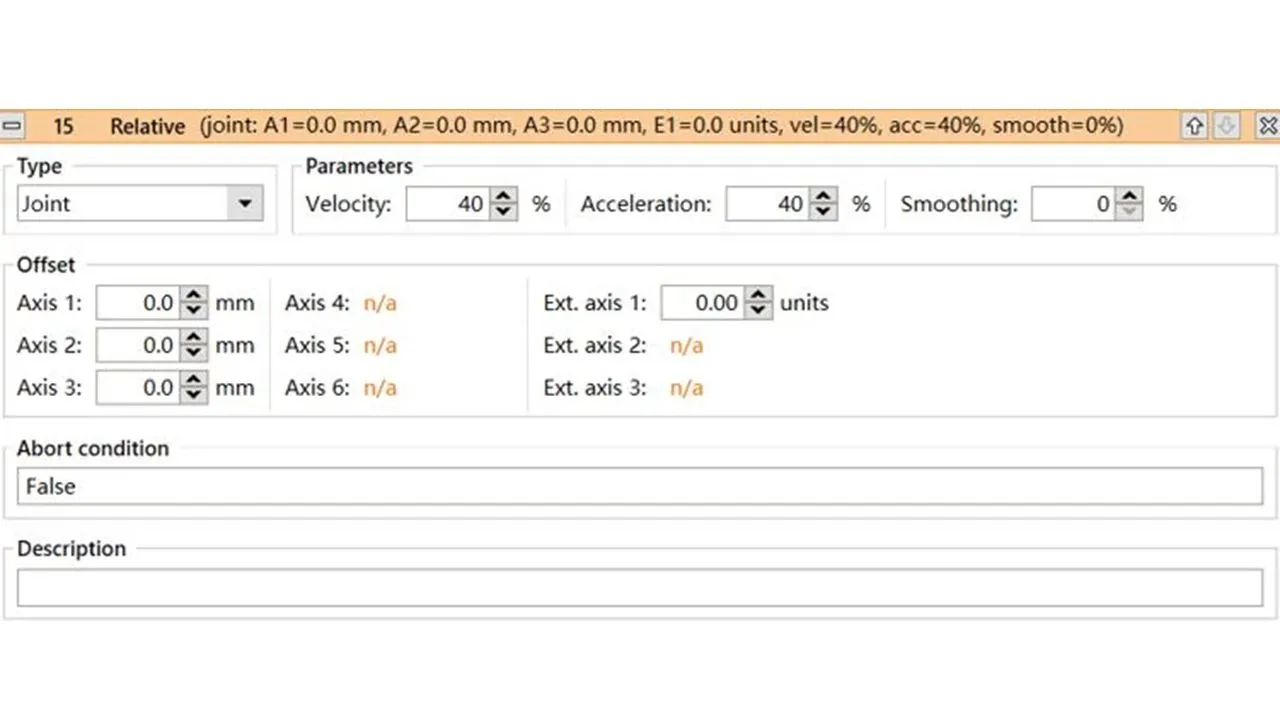
Relative相对运动
相对命令允许相对于其当前位置移动机器人。它可以通过“Active操作”→“Relative movement相对移动”下的菜单项调用。
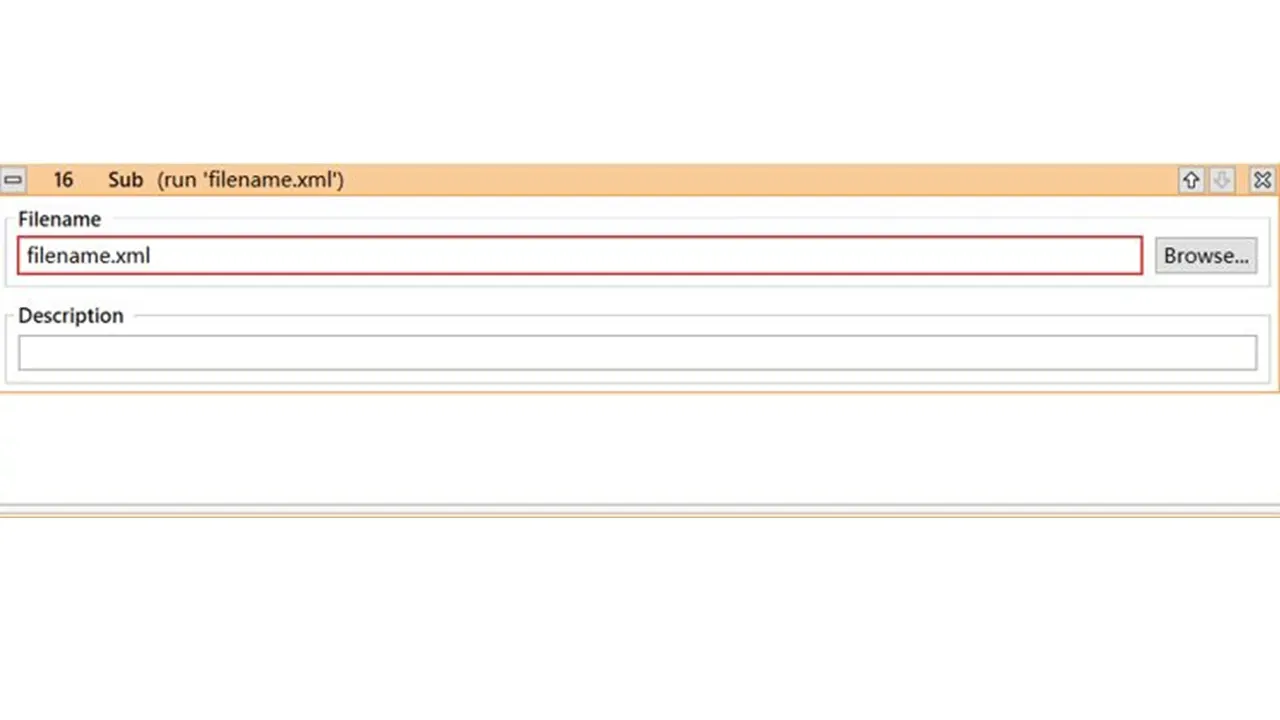
Sub子项目
可以使用 Sub 命令调用子程序。子程序文件的路径在“文件名”下指定。它是相对于iRC“数据”文件夹的“程序”子文件夹。
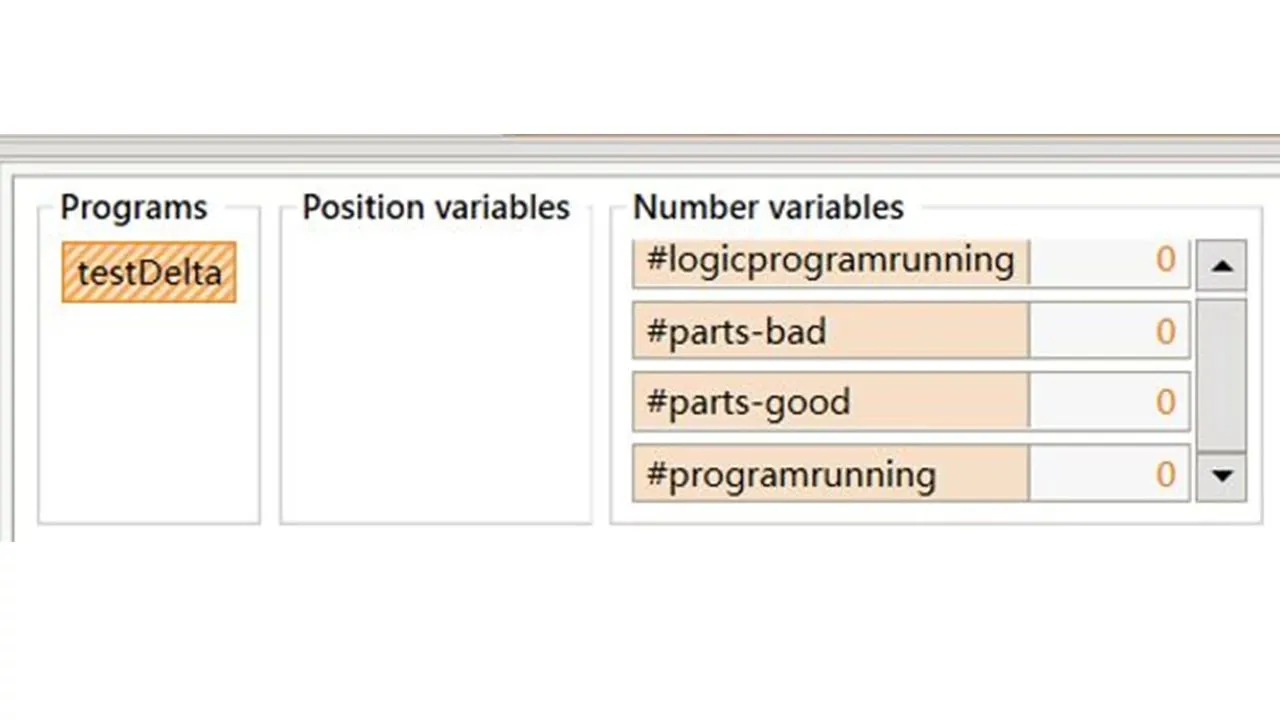
iRC和TinyCtrl的程序支持两种类型的变量:
- 数值变量:可用于存储整数或浮点数
- 位置变量:可用于存储笛卡尔位置或关节位置
更多相关信息

机器人控制系统(iRC)
易格斯iRC机器人控制软件集成了LabVIEW,Matlab,ifm,ros,Modbus, TCP/IP,PLC,BECKHOFF等接口,同时客户还能下载机器人的参考程序,快速掌握编程的方法。
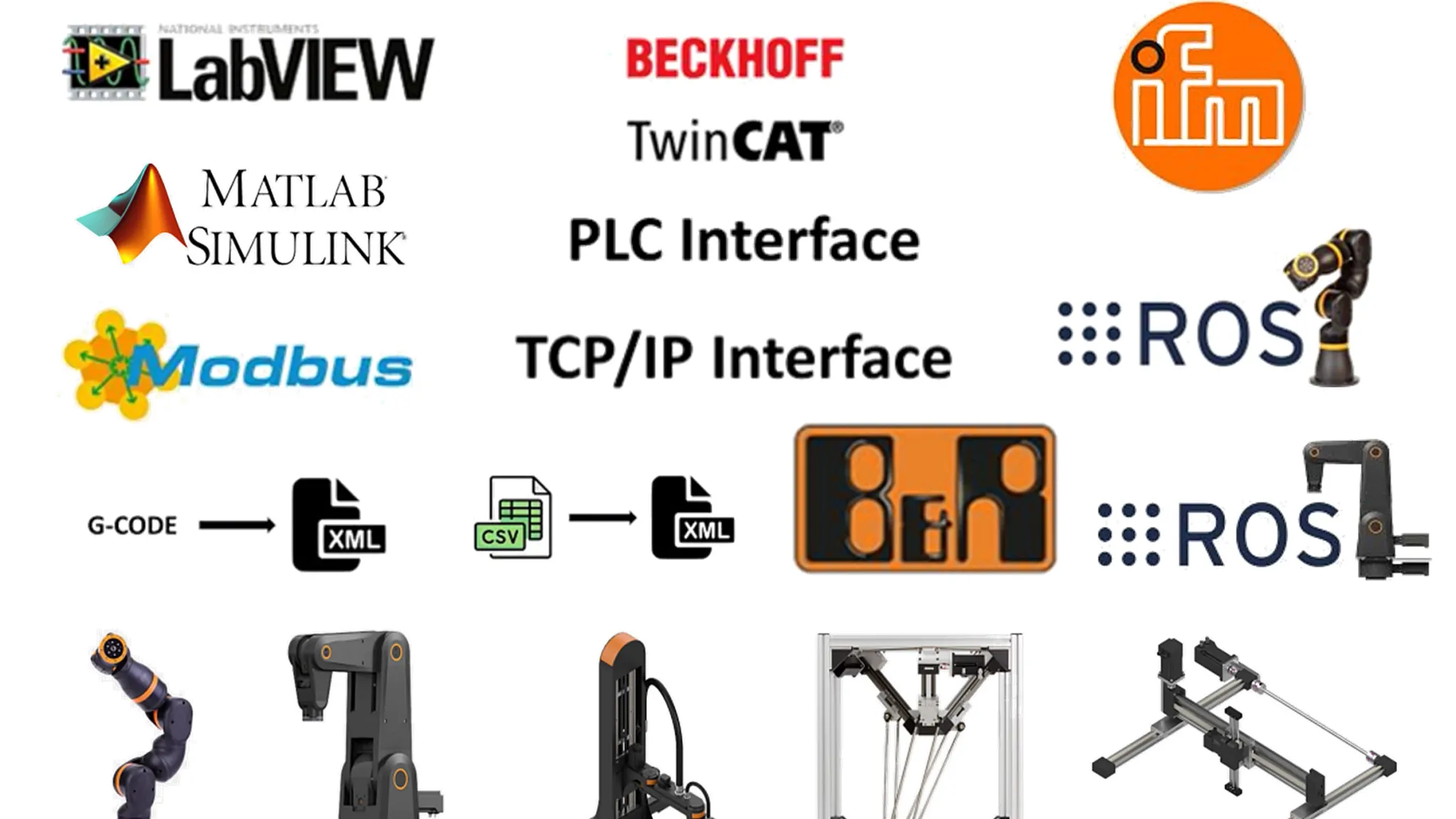
接口与参考程序
易格斯iRC机器人控制软件集成了LabVIEW,Matlab,ifm,ros,Modbus, TCP/IP,PLC,BECKHOFF等接口,同时客户还能下载机器人的参考程序,快速掌握编程的方法。
机器人课程自学
易格斯提供丰富的自学视频资源,可帮助用户快速入门机器人编程,从而开箱即用。

测试与集成
易格斯公司内部设有专门的自动化产品客户测试区域,可免费提供机器人验证。
任何产品相关的问题请联系我

刘锴 Sweet Liu LCA & RBTX 产品经理

在线咨询
扫一扫二维码,添加企业微信开始对话